



FE35FB-01000 사용 설명서
이 설명서는 레이저 스캐닝 센서 FE35FB-01000에 적합합니다.
저자: Hinson 릴리스 버전: V1.00 업데이트 시간: 2024.10.16
1.1 적용 환경에 대한 참고 사항
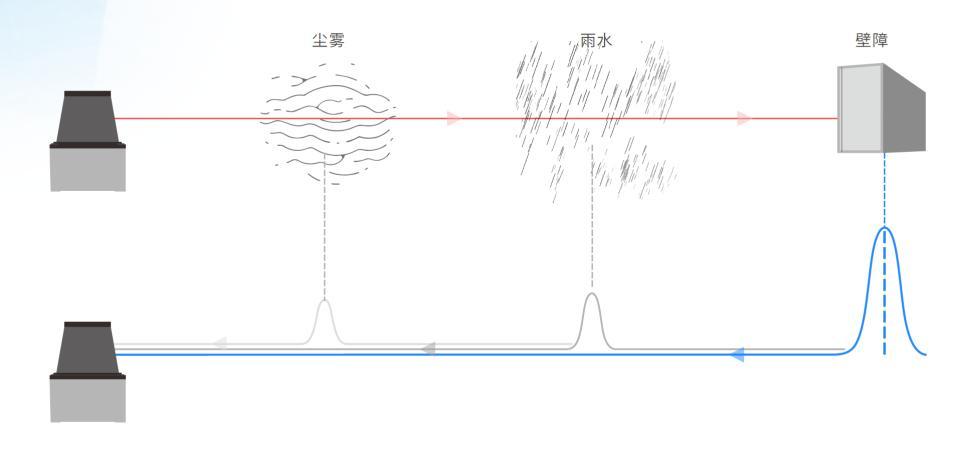
 공기 중의 증기, 연기, 먼지 및 가시 입자는 센서의 오판 또는 사용 불능을 초래할 수 있습니다.
공기 중의 증기, 연기, 먼지 및 가시 입자는 센서의 오판 또는 사용 불능을 초래할 수 있습니다.
자격을 갖춘 기술자는 센서의 연결 및 설치가 정확한지 정기적으로 확인해야 합니다.
센서의 최대 사용 수명은 10년이며, 그 이후에는 교체해야 합니다. 그렇지 않으면 필요한 성능 표준을 충족하지 못할 수 있습니다.
센서는 정기적으로 점검하고 청소해야 합니다.
이 제품은 항상 지정된 한계 내에서 지정된 기술 매개변수 및 작동 조건하에서만 사용할 수 있습니다.
 전원 공급 장치를 반대로 연결하거나 지정된 최대 작동 전압보다 높은 전압에 연결하지 마십시오. 센서가 손상될 수 있습니다.
전원 공급 장치를 반대로 연결하거나 지정된 최대 작동 전압보다 높은 전압에 연결하지 마십시오. 센서가 손상될 수 있습니다.
지정된 최소 작동 전압보다 낮은 전압으로 전원 공급 장치를 연결하면 센서가 오작동하거나 비정상적으로 작동합니다.
배선은 설명서의 지침에 따라 수행하십시오. 그렇지 않으면 센서가 입력 신호를 정확하게 감지하지 못할 수 있습니다.
출력 신호 단자에 장치를 연결할 때 센서의 부하 용량을 초과하지 마십시오. 센서 고장의 원인이 될 수 있습니다.
자격을 갖춘 공인된 담당자만 레이저 센서를 연결, 설치, 디버깅 및 설정할 수 있습니다.
센서와 관련된 주변 장치가 안정적으로 정지 상태인지 확인하십시오.
디버깅 담당자가 안전한 위치에 있는지 확인하십시오.
다른 사람이나 물체가 장비의 활성 범위 밖에 있는지 확인하십시오.
| 성능 | |
감지 거리 |
0.05m-8m (@ 반사율 2%) 0.05m-35m (@ 반사율 90%) |
감지 각도 |
312° |
측정 주파수 |
540Khz |
측정 방법 |
펄스 거리 측정 기술 (PRT) |
스캔 주파수 |
12.5Hz: 750r/min (0.025°, 0.05°, 0.1°, 0.25°, 0.5° 각도 해상도) 25.0Hz: 1500r/min (0.05°, 0.1°, 0.25°, 0.5° 각도 해상도) |
물체 모양 인식 |
모든 모양, 감지 거리에 따라 계산된 해상도 |
측정 해상도 |
1mm |
절대 정확도 |
±10mm |
측정 노이즈 |
±20mm |
| 인터페이스 | |
스위칭 입력 |
4*NPN |
스위칭 출력 |
4*NPN |
CAN |
Can 버스 CAN OPEN *1 |
이더넷 |
TCP/IP (TCP 서버, UDP) 100M |
에코 수 |
3 |
원시 측정 데이터 출력 |
지원됨 |
영역 보호 수 |
3 |
장애물 회피 채널 수 |
64 |
| Mechanical/Electrical | |
작동 전압 |
DC10~30V |
작동 전류 |
125-150mA |
소비 전력 |
< 3.4W |
광원 파장 |
905nm |
레이저 등급 |
클래스 1 (IEC 60825-1:2014) |
표시등 |
4*LED (작동 상태 표시등 녹색, 출력 상태 표시등 노란색, 주황색, 빨간색) |
재질 |
알루미늄 합금, PMMA |
보호 등급 |
IP65 |
1 |
FE 레이저 센서 |
1 unit |
2 |
Hinson 구성 소프트웨어 |
1 set |
3 |
센서 자격 증명서 |
1 piece |
소프트웨어 도구 |
소프트웨어 버전 Hinson 1.5.2 이상 |
1 set |
전원 공급 장치 |
DC24V 전원 공급 장치 |
1 piece |
도구 |
컴퓨터 구성에 RJ45 포트가 있음 (또는 변환을 통해 얻음) |
1 piece |
일련 번호 |
기능 설명 | 비고 |
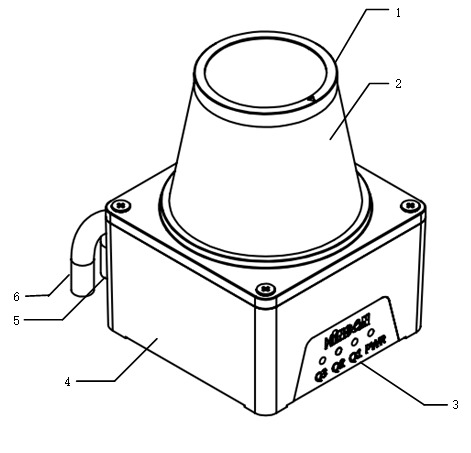
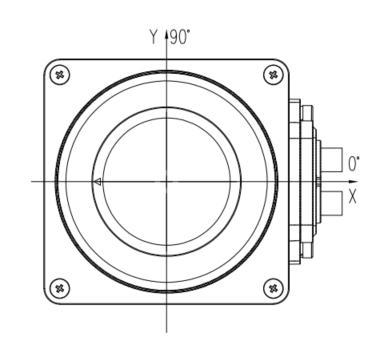
1 |
상단 덮개 | 스캔 범위와 각도 위치 표시 |
2 |
센서 감지 창 | 센서 감지 창 |
3 |
표시등 | 작동 상태 표시 |
4 |
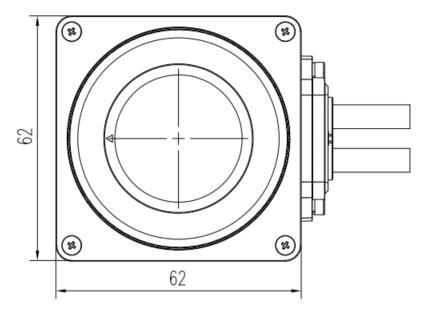
베이스 | 설치 구멍 위치 |
5 |
출력 라인 1 | 이더넷 케이블 연결 |
6 |
출력 라인 2 | 전원 및 IO 신호선 연결 |
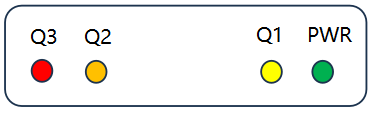
식별 |
디스플레이 |
기능 설명 | 작동 지침 |
PWR |
녹색 |
작동 상태 표시등 | 녹색 표시등 꺼짐: 센서에 전원이 공급되지 않거나 제대로 작동하지 않음; 켜짐: 센서가 정상적으로 작동함; 깜빡임: 센서가 내부 오류를 감지하고 작동을 멈춤; |
Q1 |
노란색 |
OUT1 출력 표시등 | 노란색 표시등 꺼짐: 센서에 전원이 공급되지 않거나 물체가 감지되지 않음; 켜짐: 침입 물체 감지; 깜빡임: 센서가 트리거 에지를 감지함; |
Q2 |
주황색 |
OUT2 출력 표시등 | 주황색 표시등 꺼짐: 센서에 전원이 공급되지 않거나 물체가 감지되지 않음; 켜짐: 침입 물체 감지; 깜빡임: 센서가 트리거 에지를 감지함; |
Q3 |
빨간색 |
OUT3 출력 표시등 | 빨간색 표시등 꺼짐: 센서에 전원이 공급되지 않거나 물체가 감지되지 않음; 켜짐: 침입 물체 감지; 깜빡임: 센서가 트리거 에지를 감지함; |
|
|
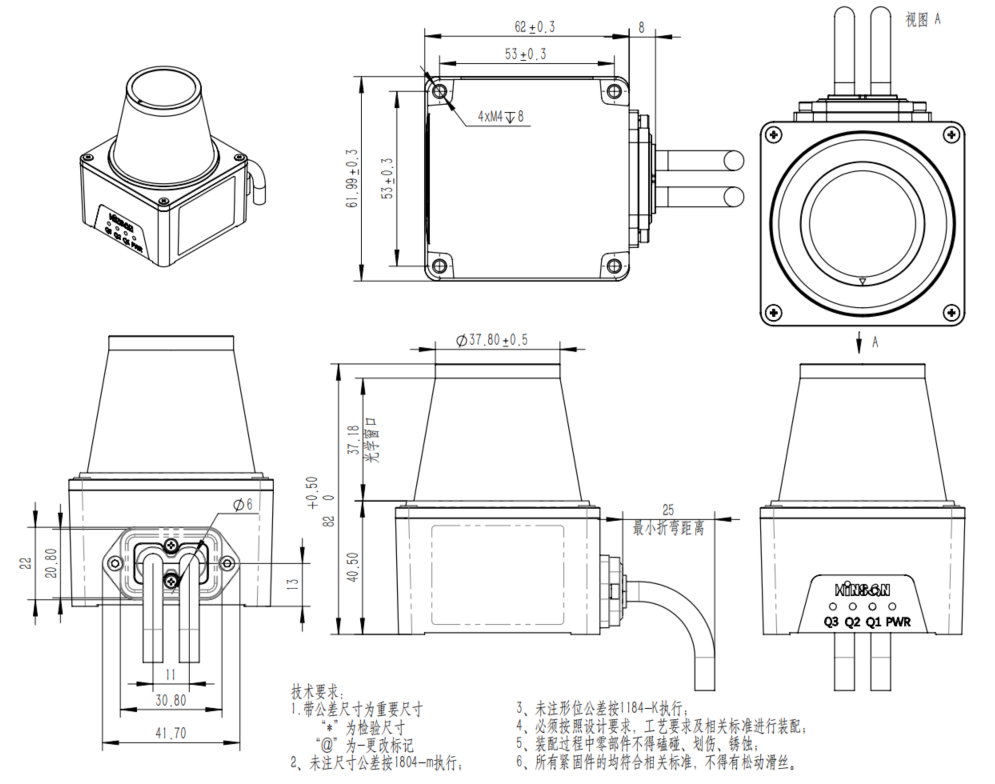
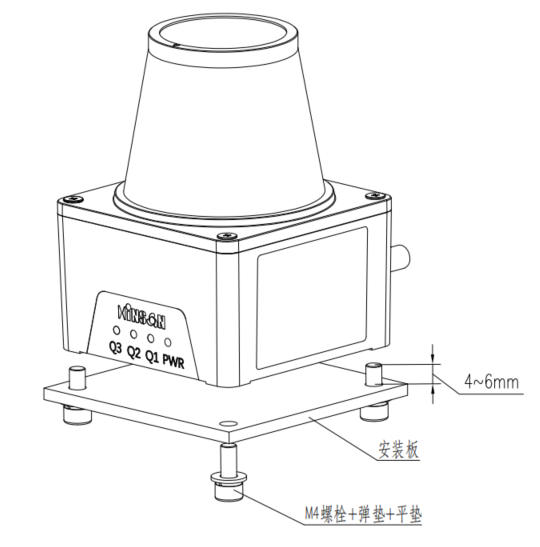
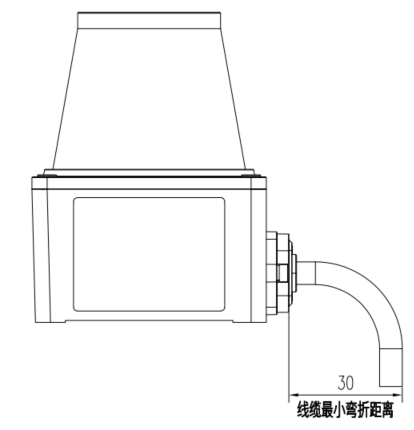
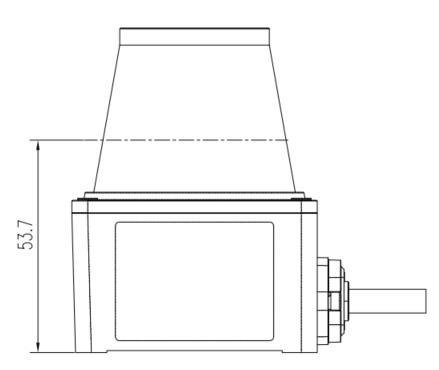
고정 나사는 풀림을 방지하기 위해 스프링 와셔를 사용해야 함 |
케이블을 위해 후면에 30mm의 공간을 확보하십시오 |
| 기능 | IO, 전원 공급 장치, 이더넷 통신 |
| 유형 | 와이어 |
| 단자 사양 | RJ45, FT10001-F2H |
| 핀 수 | 14 pins |
| 출력 방식 | 직접 출력 |
단자 |
일련 번호 |
기호 |
색상 |
기능 |
CN3 |
Pin1 |
+VIN |
갈색 |
전원 양극 입력 |
Pin2 |
-VIN |
파란색 |
전원 음극 입력 | |
Pin3 |
XCOM |
Brown-white |
입력 공통 단자 | |
Pin4 |
IN1 |
검정색 |
IO 입력 1 | |
Pin5 |
IN2 |
주황색 |
IO 입력 2 | |
Pin6 |
IN3 |
노란색 |
IO 입력 3 | |
Pin7 |
CAN_L |
녹색 |
CAN_L | |
Pin8 |
CAN_H |
보라색 |
CAN_H | |
Pin9 |
IN4 |
회색 |
IO 입력 4 | |
Pin10 |
YCOM |
흰색 |
출력 공통 단자 | |
Pin11 |
OUT1 |
White-green |
IO 출력 1 | |
Pin12 |
OUT2 |
White-blue |
IO 출력 2 | |
핀 13 |
OUT 3 |
빨간색 |
IO 출력 3 | |
핀 14 |
OUT 4 |
흰색과 빨간색 |
IO 출력 4 |
단자 |
일련 번호 |
기호 |
색상 |
기능 |
CN2 |
Pin1 |
ETH TX+ |
빨간색과 흰색 |
이더넷 출력 + |
Pin2 |
ETH TX- |
빨간색 |
이더넷 출력 - | |
Pin3 |
ETH RX+ |
녹색과 흰색 |
이더넷 입력 + | |
Pin4 |
ETH RX- |
녹색 |
이더넷 입력 - |
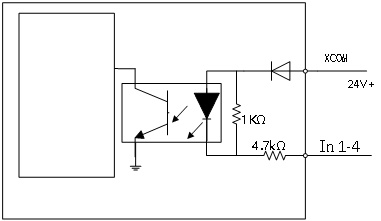
5.2.1 입력 신호 연결
입력은 광 절연 입력을 사용하는 NPN 신호입니다.
외부 전원 공급 장치 사용: XC0M 입력 DC24V±20%, 100mA 이상;
센서는 16개의 채널을 가지고 있으며, 입력 신호는 4개의 IO 포트를 통해 결합되어 지정된 채널 번호로 전환됩니다. 채널의 감지 범위는 구성 소프트웨어를 통해 미리 설정해야 합니다. 외부 장치는 입력 신호를 통해 영역을 선택하고 전환합니다.
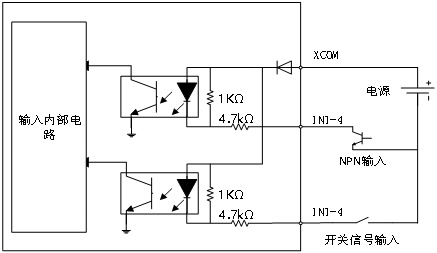
FE 센서는 신호를 결합하기 위해 4개의 입력 포트를 제공합니다.
ON: 신호가 있음;
OFF: 신호 없음 또는 개방 회로;
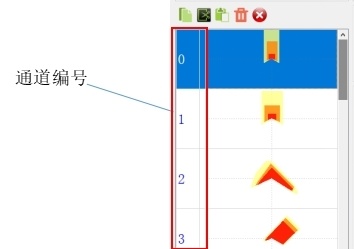
| 채널 번호 | IN4 | IN3 | IN2 | IN1 |
| 63 | OFF | OFF | OFF | OFF |
| 62 | OFF | OFF | OFF | ON |
| 61 | OFF | OFF | ON | OFF |
| 60 | OFF | OFF | ON | ON |
| 59 | OFF | ON | OFF | OFF |
| 58 | OFF | ON | OFF | ON |
| 57 | OFF | ON | ON | OFF |
| 56 | OFF | ON | ON | ON |
| 55 | ON | OFF | OFF | OFF |
| 54 | ON | OFF | OFF | ON |
| 53 | ON | OFF | ON | OFF |
| 52 | ON | OFF | ON | ON |
| 51 | ON | ON | OFF | OFF |
| 50 | ON | ON | OFF | ON |
| 49 | ON | ON | ON | OFF |
| 48 | ON | ON | ON | ON |
알림: 16개의 채널이 모두 필요하지 않은 경우 필요한 채널 수에 따라 입력 신호를 결정할 수 있습니다.
전환 시간
센서가 채널 전환 신호를 수신한 후 스캔 주기로 인해 전환 지연이 발생합니다. 전환 지연은 아래 그림에 나와 있습니다.
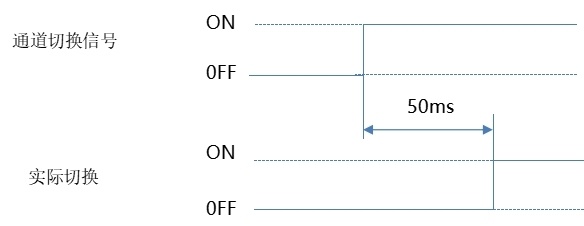
참고그래픽이 없는 채널로 전환할 때 센서는 이전 그래픽 채널의 상태를 계속 모니터링합니다;
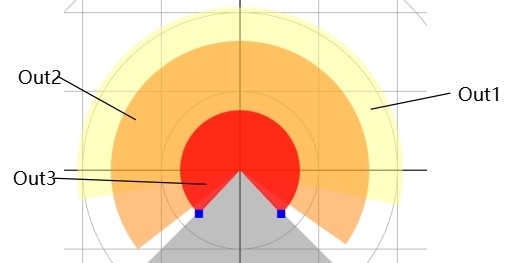
출력 신호는 기능을 사용합니다
| 포트 | 기능 | 출력 로직 |
| OUT1 | 원격 장애물 경고 및 감속에 사용됨; | 기본값: 일반적으로 닫힘, 구성 소프트웨어를 통해 일반적으로 열림으로 변경 가능; |
| OUT2 | 일반적인 장애물 감지 및 정지에 사용됨; | 기본값: 일반적으로 닫힘, 구성 소프트웨어를 통해 일반적으로 열림으로 변경 가능; |
| OUT 3 | 근접 비상 정지에 사용됨; | 기본값: 일반적으로 닫힘, 구성 소프트웨어를 통해 일반적으로 열림으로 변경 가능; |
| ERR | 센서 고장 상태 출력에 사용됨; | 기본값: 일반적으로 열림, 변경 불가능; |
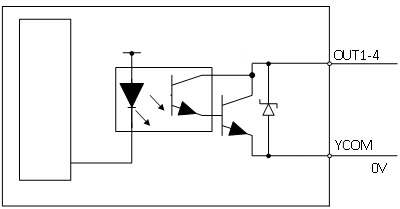
출력은 콜렉터 오픈(NPN) 신호이며, 광 절연 출력을 사용하고, 신호가 있을 때 출력 전압은 0V임.
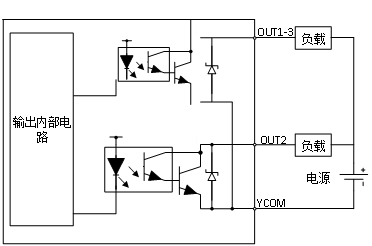
모든 출력 포트는 NPN 출력입니다. 아래 회로도를 참조하십시오:
|
||
센서 출력 포트는 구성 소프트웨어에 그려진 그래픽에 해당합니다.
|
||
| 참고:감지 출력은 해당 출력에 그래픽이 그려져 있을 때만 발생합니다; | ||
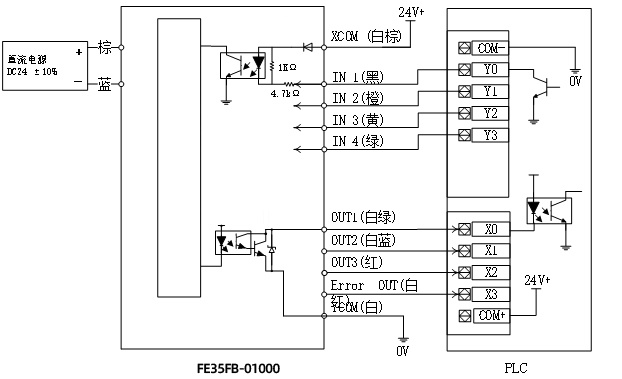
5.2.4 연결 다이어그램
모든 16채널과 모든 출력이 완전히 사용될 때의 배선.
|
|
| FE35FB--01000 PLC | |
| 이 그림은 상위 컴퓨터가 NPN 튜브를 통해 신호를 출력하고 신호를 수신하는 것을 보여줍니다. | |
X0-X3은 PLC의 신호 입력 포트입니다; |
|
| 참고:입력 및 출력 포트는 단락되거나 지정된 전류를 초과하는 부하에 연결되어서는 안 됩니다. 그렇지 않으면 센서가 손상될 수 있습니다. |
| DC 전원 공급 장치 | 전압 | DC10V-DC30V |
| 전류 | 1A 이상 | |
| 컴퓨터 | 시스템 | Windows 7 이상 |
| 포트 | RJ45 인터페이스가 장착되어 있거나 USB-RJ45 네트워크 케이블 인터페이스가 장착되어 있음 | |
| 해상도 | 1280*720 이상 |
구성 소프트웨어의 압축을 풀고 더블 클릭합니다. '장치 목록' 인터페이스에 들어간 후 클릭합니다.
'장치 목록' 인터페이스에 들어간 후 클릭합니다. 다음 인터페이스로 들어갑니다:
다음 인터페이스로 들어갑니다:
다음 단계 1, 2, 3, 4에 따라 센서와 구성 소프트웨어를 연결합니다.
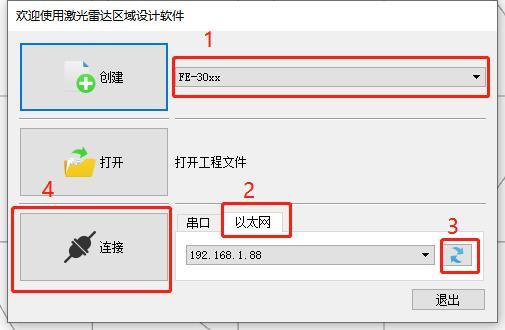
센서가 구성 소프트웨어에 연결되면 다음 인터페이스가 표시됩니다:
기본 메뉴 |
보조 메뉴 |
3차 메뉴 |
해당 아이콘 | 비고 |
|---|---|---|---|---|
파일 |
새 파일 |
- |

|
새 파일 |
파일 열기 |
- |

|
기존 파일 열기 | |
파일 저장 |
- |

|
편집된 파일 저장 | |
다른 이름으로 저장 |
- |

|
편집된 파일을 다른 이름으로 저장 | |
종료 |
- |

|
현재 구성 소프트웨어 인터페이스 종료 | |
편집 |
실행 취소 |
- |

|
마지막 작업 실행 취소 |
다시 실행 |
- |

|
마지막 작업 복원 | |
복사 |
- |

|
특정 감지 채널의 감지 그래프 복사 | |
잘라내기 |
- |

|
특정 감지 채널의 감지 그래프 잘라내기 | |
붙여넣기 |
- |

|
특정 감지 채널의 감지 그래프를 다른 채널에 붙여넣기 | |
삭제 |
- |

|
현재 선택된 감지 채널 그래프 삭제 | |
모두 삭제 |
- |

|
모든 감지 채널 그래프 삭제 | |
설정 적용 |
- |

|
- | |
창 |
창 |
편집 |

|
아이콘을 클릭하여 구성 소프트웨어의 편집 기능 상자를 표시합니다. |
모니터링 |

|
아이콘을 클릭하여 구성 소프트웨어의 모니터링 상태를 표시합니다. | ||
센서 설정 |

|
아이콘을 클릭하여 구성 소프트웨어의 센서 매개변수 설정 기능 상자를 표시합니다. | ||
입력 및 출력 시뮬레이션 |

|
아이콘을 클릭하여 센서 입력 및 출력 시뮬레이션 기능 상자를 표시합니다. | ||
자체 점검 상태 |

|
아이콘을 클릭하여 센서 자체 점검 상태를 표시합니다. | ||
거리 |
- |

|
클릭하여 센서의 현재 320° 범위 스캐닝 프로필을 닫거나 표시합니다. | |
강도 |
- |

|
클릭하여 장애물의 반사 강도를 닫거나 표시합니다. | |
데이터 목록 |
- |

|
구성 소프트웨어는 현재 모든 검출 지점의 거리 데이터 출력을 지원하지 않으므로 이 항목은 사용할 수 없습니다. | |
설정 |
시리얼 포트 |
- |

|
센서는 구성 소프트웨어에 대한 시리얼 포트 연결을 지원하지 않으므로 이 항목은 사용할 수 없습니다. |
이더넷 |
- |

|
구성 소프트웨어에 대한 이더넷 연결을 선택하려면 클릭하십시오. |
|
시리얼 포트 설정 |
- |

|
센서는 구성 소프트웨어에 대한 시리얼 포트 연결을 지원하지 않으므로 이 항목은 사용할 수 없습니다. |
|
이더넷 설정 |
- |

|
센서의 현재 이더넷 주소를 보려면 클릭하십시오. |
|
|
인터페이스 |
시리얼 포트 |

|
센서는 구성 소프트웨어에 대한 시리얼 포트 연결을 지원하지 않으므로 이 항목은 사용할 수 없습니다. |
|
이더넷 |
|
||
연결 |
장치 연결 |
- |

|
센서를 구성 소프트웨어에 연결하려면 클릭하십시오. |
장치 연결 끊기 |
- |

|
센서를 구성 소프트웨어에서 연결을 끊으려면 클릭하십시오. |
|
데이터 업로드 |
- |

|
센서에 대해 설정된 검출 채널 그래프 및 다양한 매개변수를 업로드하려면 클릭하십시오. |
|
데이터 다운로드 |
- |

|
검출 채널 그래프 및 다양한 매개변수를 다운로드하려면 클릭하십시오. |
|
장치 재시작 |
- |

|
검출 채널 그래프 및 해당 매개변수를 설정한 후 이 아이콘을 클릭하여 매개변수가 적용되도록 센서를 다시 시작하십시오. |
|
센서 정보 |
- |

|
- | |
디스플레이 |
그래프 표시 |
- |

|
이 아이콘을 클릭하여 센서의 320° 스캐닝 프로필을 평면 그래프로 표시하십시오. |
포인트 클라우드 표시 |
- |

|
이 아이콘을 클릭하여 센서의 320° 스캐닝 프로필을 포인트 클라우드로 표시하십시오. |
|
선 표시 |
- |

|
이 아이콘을 클릭하여 센서의 320° 스캐닝 프로필을 선으로 표시하십시오. |
|
언어 |
간체 중국어 |
- |

|
이 아이콘을 클릭하여 구성 소프트웨어를 중국어로 표시하십시오. |
영어 |
- |

|
이 아이콘을 클릭하여 구성 소프트웨어를 영어로 표시하십시오. |
|
도움말 |
정보 |
- |

|
이 아이콘을 클릭하여 구성 소프트웨어의 버전 정보를 표시하십시오. |
가이드 |
- |

|
6.2.3 바로 가기 아이콘
모든 바로 가기 아이콘은 메뉴 모음의 섹션 1에 설명되어 있습니다.
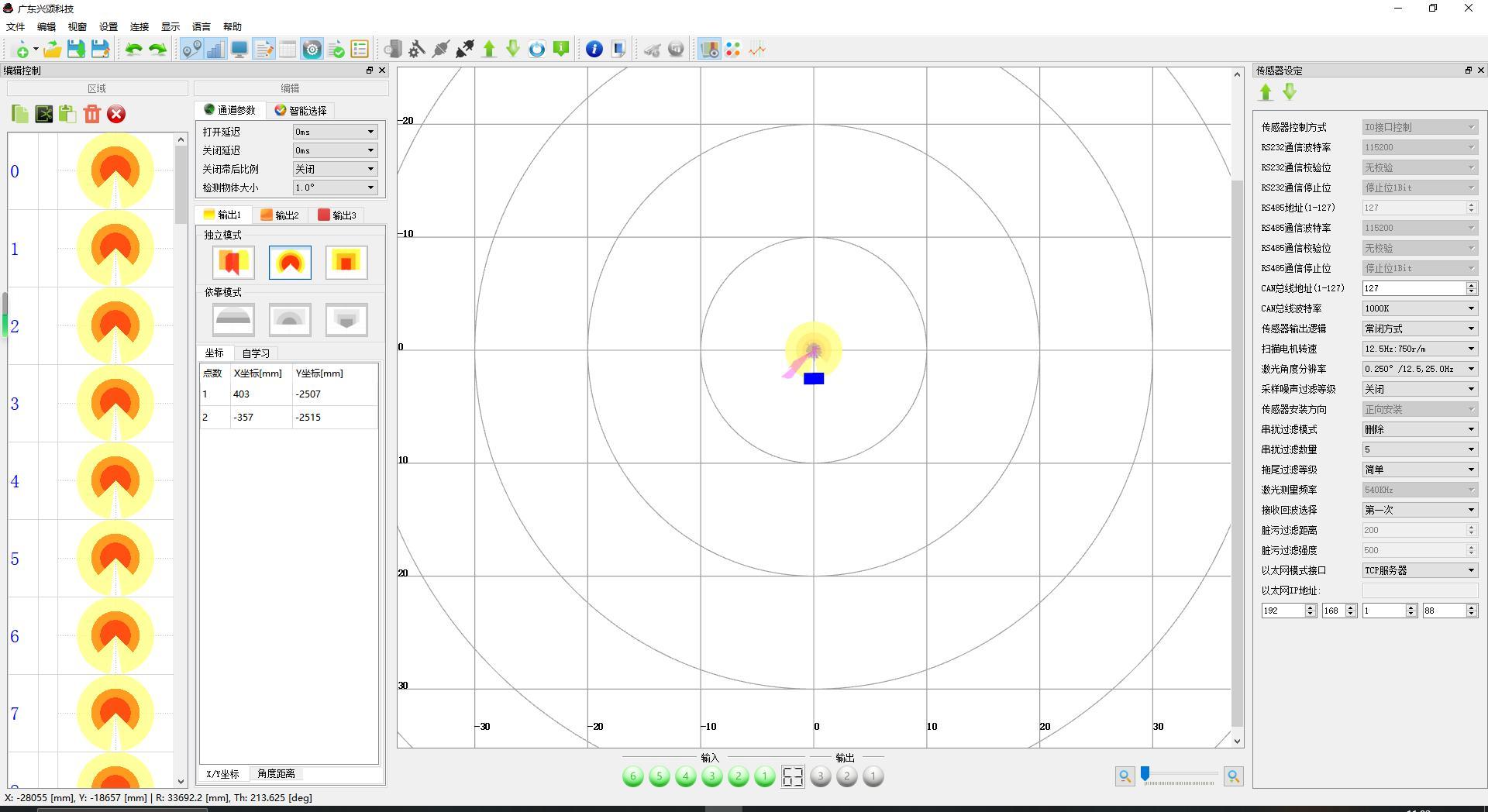
6.2.4 검출 채널 그래픽 편집
센서는 0-63의 검출 채널을 지원하며 각 검출 채널은 3개의 검출 영역 그래픽 출력을 지원합니다. 센서는 이더넷을 통해 채널을 선택하고 채널의 3개 검출 영역에 장애물이 침입했는지 여부를 출력할 수 있습니다.
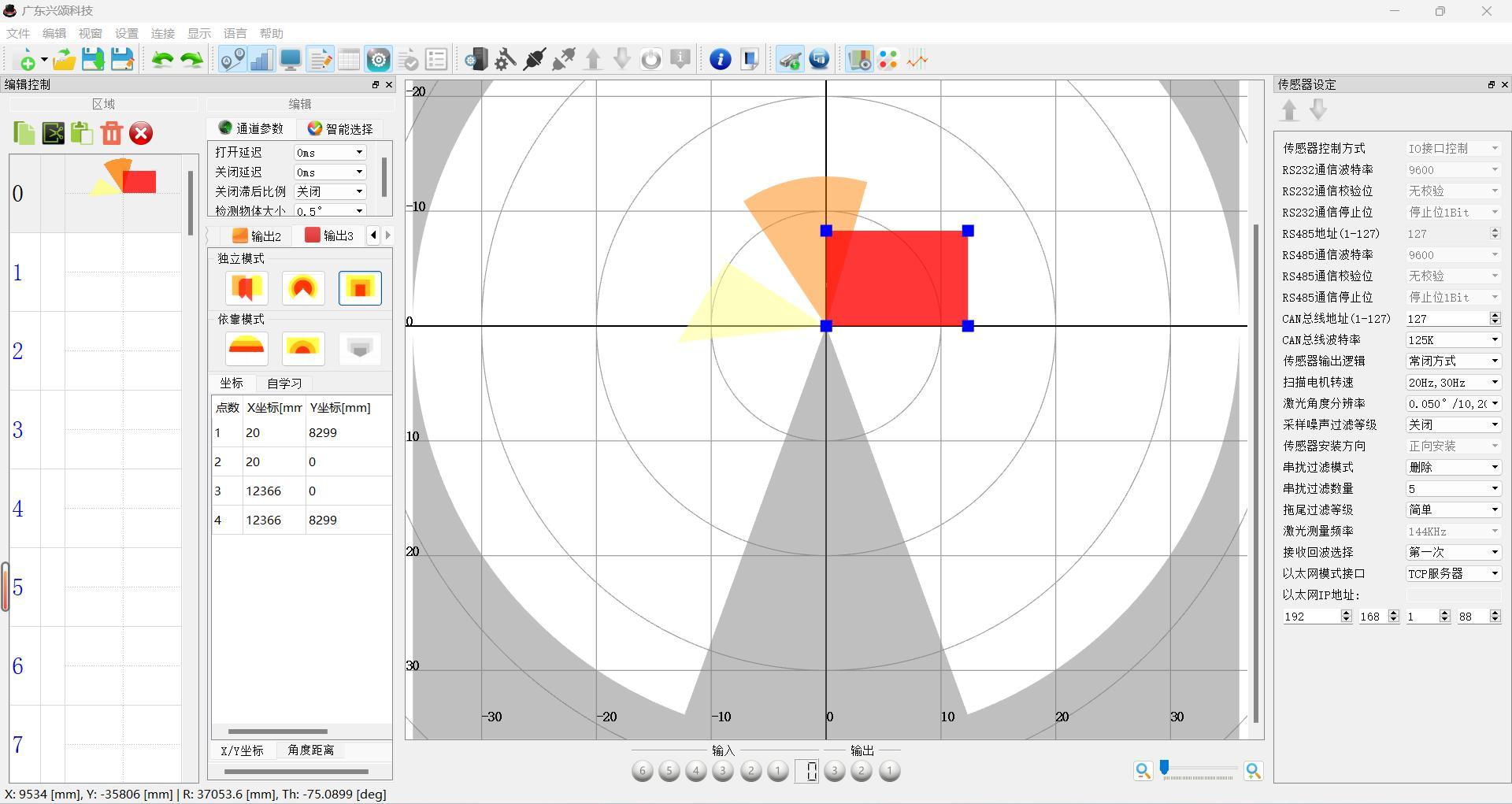
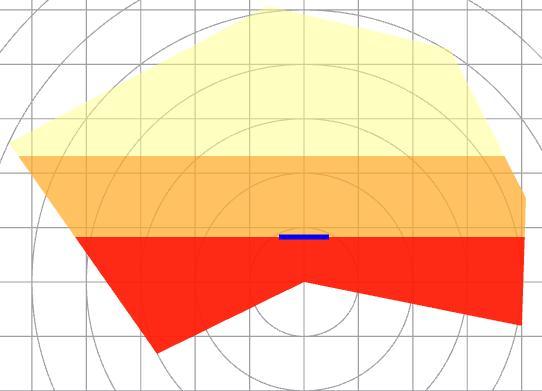
6.2.5 출력 편집
채널 검출 그래픽 출력 1, 출력 2, 출력 3 편집 모드.
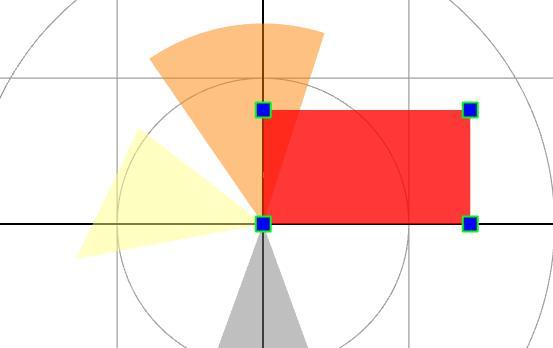
독립 모드: 독립 모드에서는 불규칙한 모양, 섹터 및 직사각형을 개별적으로 설정할 수 있으며, 불규칙한 모양은 최대 100개의 연결된 점으로 구성될 수 있습니다.
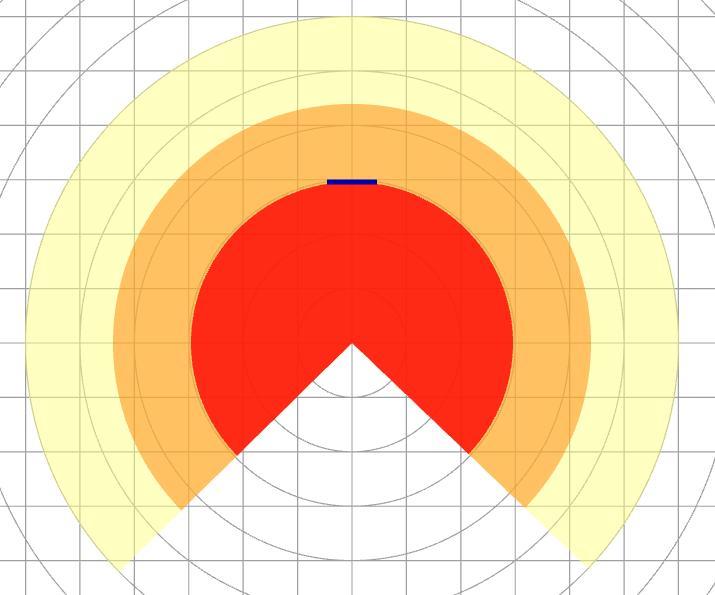
종속 모드: 출력 1의 그래픽을 설정한 후 종속 모드를 선택하여 다른 배율로 출력 1의 그래픽을 복사할 수 있습니다.
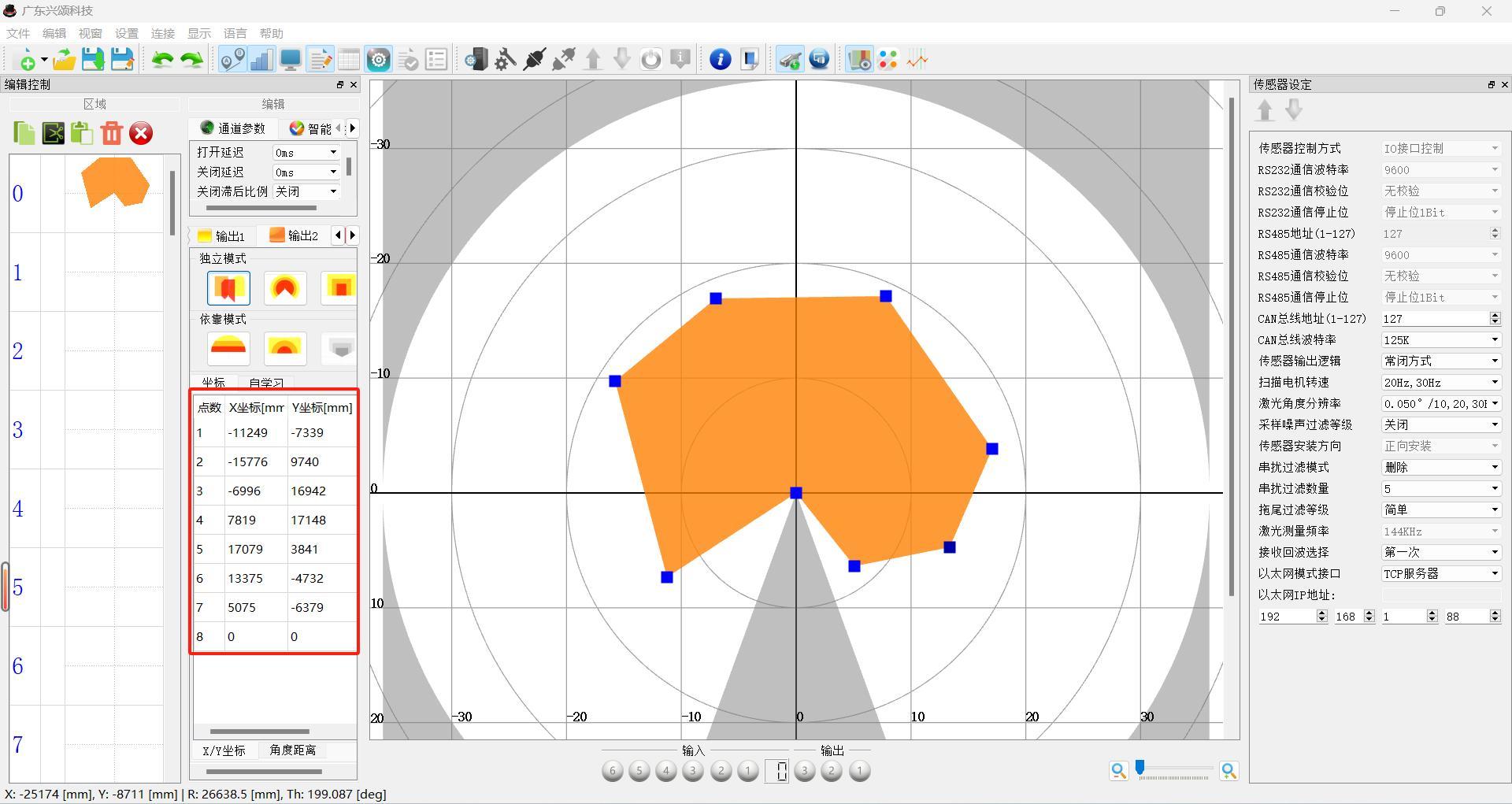
6.2.6 좌표 및 각도 값
독립 모드에서 불규칙한 모양의 각 점의 좌표(X, Y):
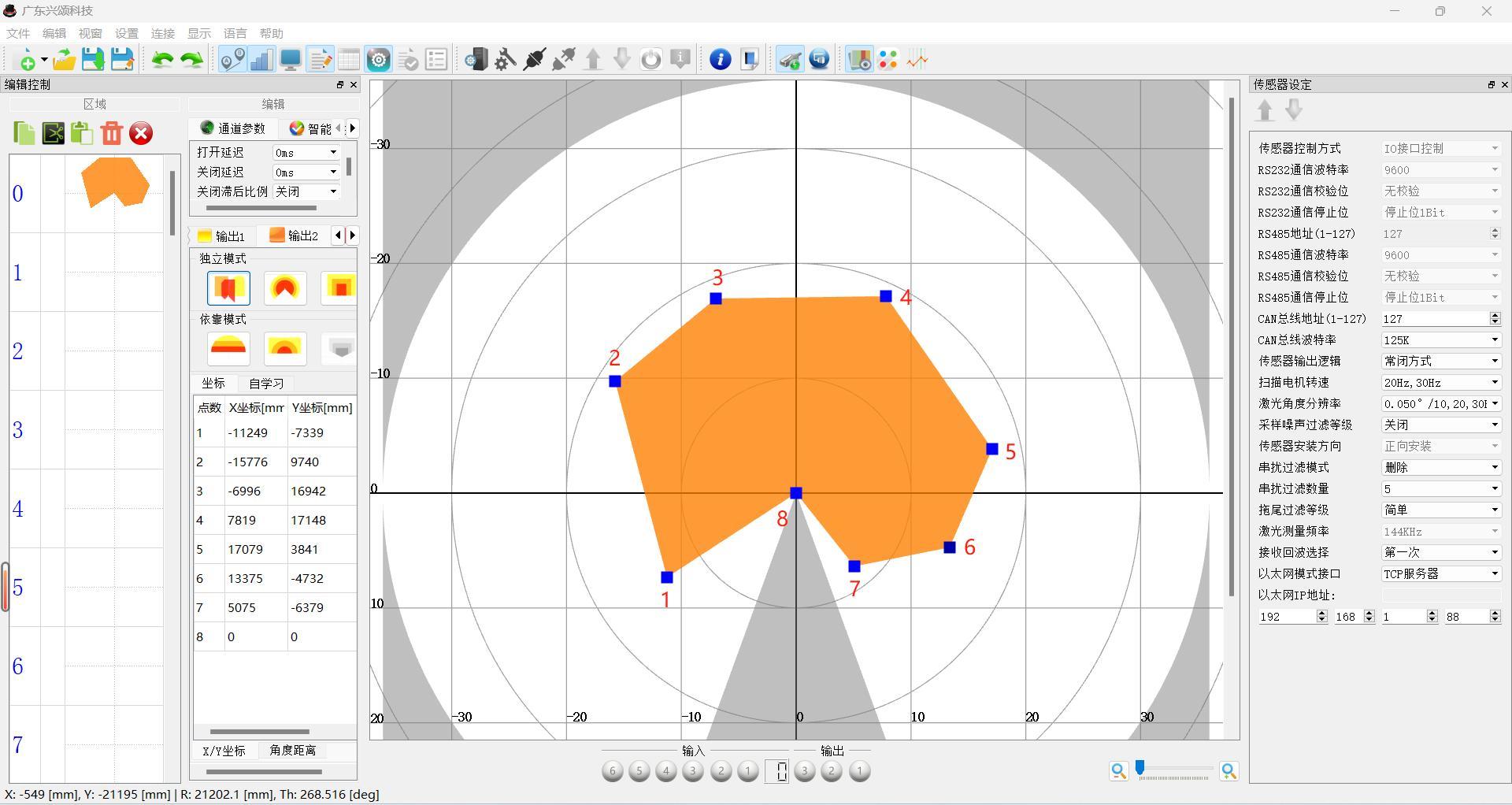
참고: 점 8은 좌표의 원점입니다.
독립 모드에서 원점으로부터 불규칙한 모양의 각 점까지의 거리와 각도:
참고: 점 8은 좌표의 원점입니다.
6.2.7 스캐닝 상태 표시
스캐닝 프로필, 반사 강도, 검출 채널 그래픽 표시 영역
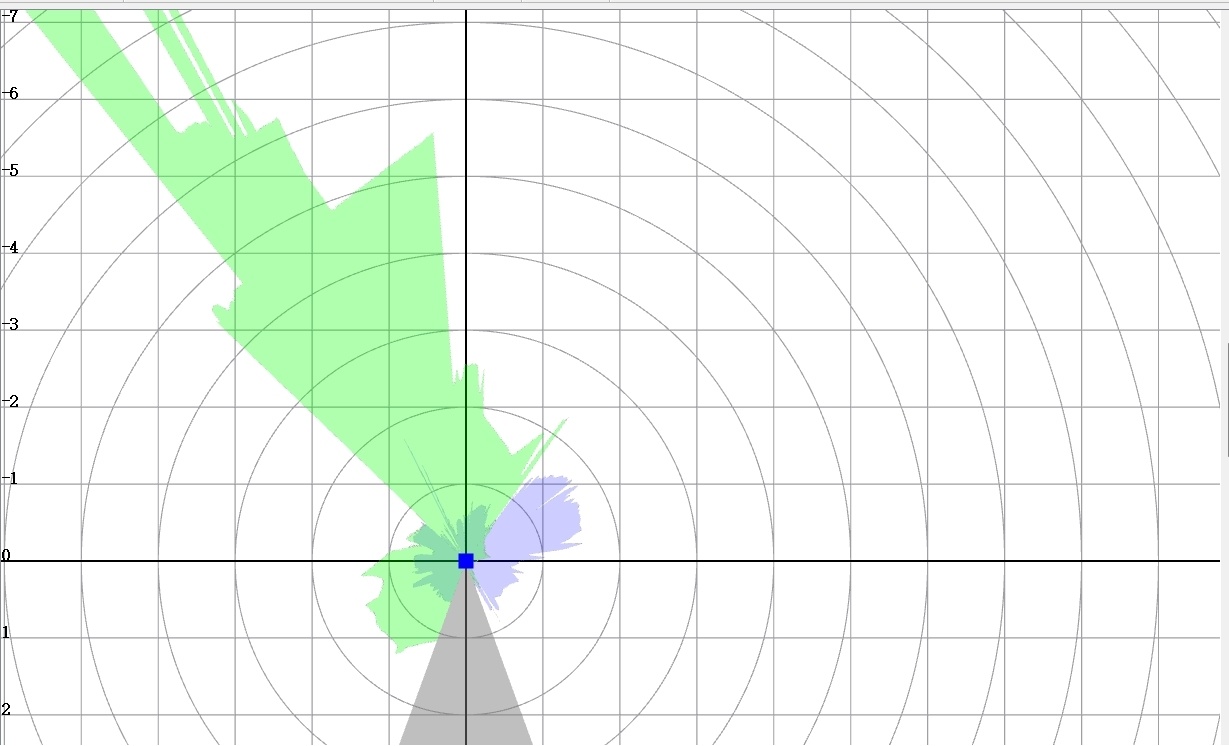
참고: 1 녹색 선은 스캐닝 프로필을 나타내고, 2 파란색 선은 반사 강도를 나타냅니다.
- 4개의 스위치 수량 입력 및 2개의 스위치 수량 출력
- 4개의 스위치 수량 입력은 검출 채널 48-63을 선택합니다(이더넷을 통해 선택된 채널을 지정할 수도 있음).
- 2개의 스위치 수량은 출력 1과 출력 3의 상태 신호를 각각 출력합니다.
매개변수 목록 |
매개변수 값 |
비고 |
|---|---|---|
센서 제어 방법 |
IO 인터페이스 제어 |
센서 채널을 선택할 때 IO, Modbus, Canopen 중 하나를 선택하십시오. 동시에 하나만 유효할 수 있으며, 출력 중에는 IO가 항상 유효합니다. |
Modbus 통신 제어 |
센서 채널을 선택할 때 IO, Modbus, Canopen 중 하나를 선택하십시오. 동시에 하나만 유효할 수 있으며, 출력 중에는 IO가 항상 유효합니다. Modbus 통신 제어를 선택하면 Modbus 출력이 유효합니다. |
|
Canopen 통신 제어 |
센서 채널을 선택할 때 IO, Modbus, Canopen 중 하나를 선택하십시오. 동시에 하나만 유효할 수 있으며, 출력 중에는 IO가 항상 유효합니다. Canopen 통신 제어를 선택하면 Canopen 출력이 유효합니다. |
|
RS485 주소(1-127) |
1-127 |
RS485 통신 주소 1-127을 설정할 수 있습니다. |
RS485 통신 보드 레이트 |
9600bps |
RS485 통신 보드 레이트 설정 |
19200bps |
||
38400bps |
||
57600bps |
||
115200bps |
||
RS485 패리티 비트 |
패리티 없음 |
RS485 패리티 코드 설정 |
홀수 패리티 |
||
짝수 패리티 |
||
RS485 통신 스톱 비트 |
스톱 비트 1비트 |
RS485 스톱 비트 설정 |
스톱 비트 1.5비트 |
||
스톱 비트 2비트 |
||
CAN 버스 주소(1-127) |
1-127 |
CAN 통신 주소 1~127을 설정할 수 있습니다. |
CAN 버스 보드 레이트 |
125K |
CAN 버스 보드 레이트 |
250K |
||
500K |
||
1000K |
||
센서 출력 로직 |
노멀리 오픈 모드 |
센서 출력 노멀리 오픈, 노멀리 클로즈드 설정 |
노멀리 클로즈드 모드 |
||
레이저 각도 분해능 |
0.025°/12.5HZ 0.050°/12.5, 25HZ 0.100°/12.5, 25, 50HZ 0.200°/50HZ 0.250°/12.5, 25HZ 0.500°/12.5, 25, 50HZ |
기본 분해능 0.250° |
노이즈 필터링 레벨 |
끔 단순
중간
엄격 |
노이즈 필터링 레벨 설정, 기본값은 끔 |
센서 설치 방향 |
정방향 설치 |
현재 매개변수가 적용되지 않음 |
크로스토크 필터링 모드 |
끔 피팅 삭제 |
기본 삭제 다른 센서에 대한 간섭 방지 활성화 |
크로스토크 필터링 수량 |
3~8 |
기본값은 5이며, 필터링 포인트 수를 나타냅니다. 필터링 포인트가 많을수록 간섭 방지 효과는 향상되지만, 이미지 가장자리 부분이 약간 왜곡될 수 있습니다. |
트레일링 필터 레벨 |
끔 단순
중간
엄격 |
트레일링 필터 레벨 설정, 기본값은 단순 |
레이저 측정 주파수 |
540KHz |
센서 측정 주파수, 현재 이 매개변수는 수정할 수 없습니다. |
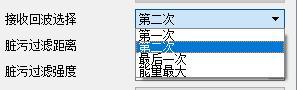
에코 선택 |
처음 두 번째 마지막 최대 에너지 |
처음: 일반 모드, 필터링 기능 없음 두 번째: 두 번째 에코 선택, 필터링 기능 포함 마지막: 마지막 에코 선택, 필터링 기능 포함 최대 에너지: 최대 에너지를 가진 에코 선택, 필터링 기능 포함 기본값은 처음 |
먼지 필터링 거리 |
0~2000 |
먼지 필터링 거리 설정, 기본값은 200 |
먼지 필터링 강도 |
0~2000 |
먼지 필터링 거리 설정, 기본값은 200 |
이더넷 모드 인터페이스 |
TCP 서버 | 기본 TCP 서버 |
UDP 모드 |
||
이더넷 IP 주소 |
센서 IP 주소 설정 |
6.2.10 멀티 에코 설정 (FE35FB-XXXXX용)
|
|
처음 |
일반 모드, 필터링 기능 없음 |
두 번째 |
두 번째 에코 선택, 필터링 기능 포함 (에코 기능 권장 옵션) |
마지막 |
마지막 에코 선택, 필터링 기능 포함 |
최대 에너지 |
최대 에너지를 가진 에코 수신 |
참고: 여러 레이저의 경우 멀티 에코 기능을 사용하고 크로스토크 필터링 모드 삭제를 선택하면 이미지에서 일부 포인트 클라우드가 사라집니다. 위 기능을 동시에 사용하지 마십시오. |
|
|
|
|
멀티 에코 기술은 각 측정 빔에 대해 여러 에코 신호를 감지하여 방출된 빔의 작동 주기 동안 비, 먼지 또는 복잡한 구조로 인한 에코를 식별하고 필요한 경우 필터링할 수 있습니다.
에코를 별도의 측정값으로 표시하려면 두 개체 사이에 약 2.5m의 최소 거리가 있어야 합니다.
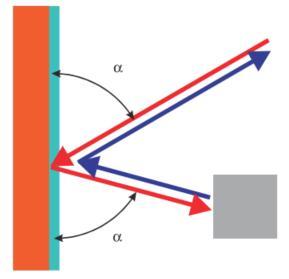
● 매끄러운 반사 표면
매끄러운 반사 표면은 감지할 수 없지만, 매끄러운 반사 표면에서 반사된 빛으로 조명된 개체는 감지할 수 있습니다.
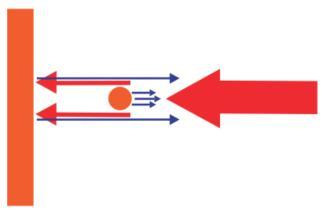
● 작은 개체 또는 개체 없음 감지
감지된 개체가 빔 직경보다 작은 경우 다음과 같은 경우가 있을 수 있습니다.
① 작은 개체의 표면이 충분히 반사되지 않고 배경 개체가 없으므로 감지할 수 없습니다.
② 작은 개체는 충분히 반사되지 않지만 배경 개체는 충분히 반사되어 감지 오류가 발생합니다.
③ 작은 개체와 배경 개체 모두 충분히 반사되어 측정값이 왜곡됩니다.
◆ 매개변수 설정
구성 소프트웨어를 열고 센서(서버 측) 설정 인터페이스로 들어가 다음 매개변수를 설정합니다.

|
매개변수 이름 |
매개변수 값 |
기본값 |
이더넷 모드 |
TCP 서버 |
TCP 서버 |
|
UDP 모드 |
|||
이더넷 IP 주소 |
192.168.1.1~254
마지막 바이트는 1~254로 설정할 수 있습니다. 센서(서버) 포트는 8080으로 고정되어 있습니다. |
192.168.1.88 |
클라이언트가 요청을 시작하고 연결을 설정한 후 데이터 전송이 시작되며 다음 규칙을 따릅니다.
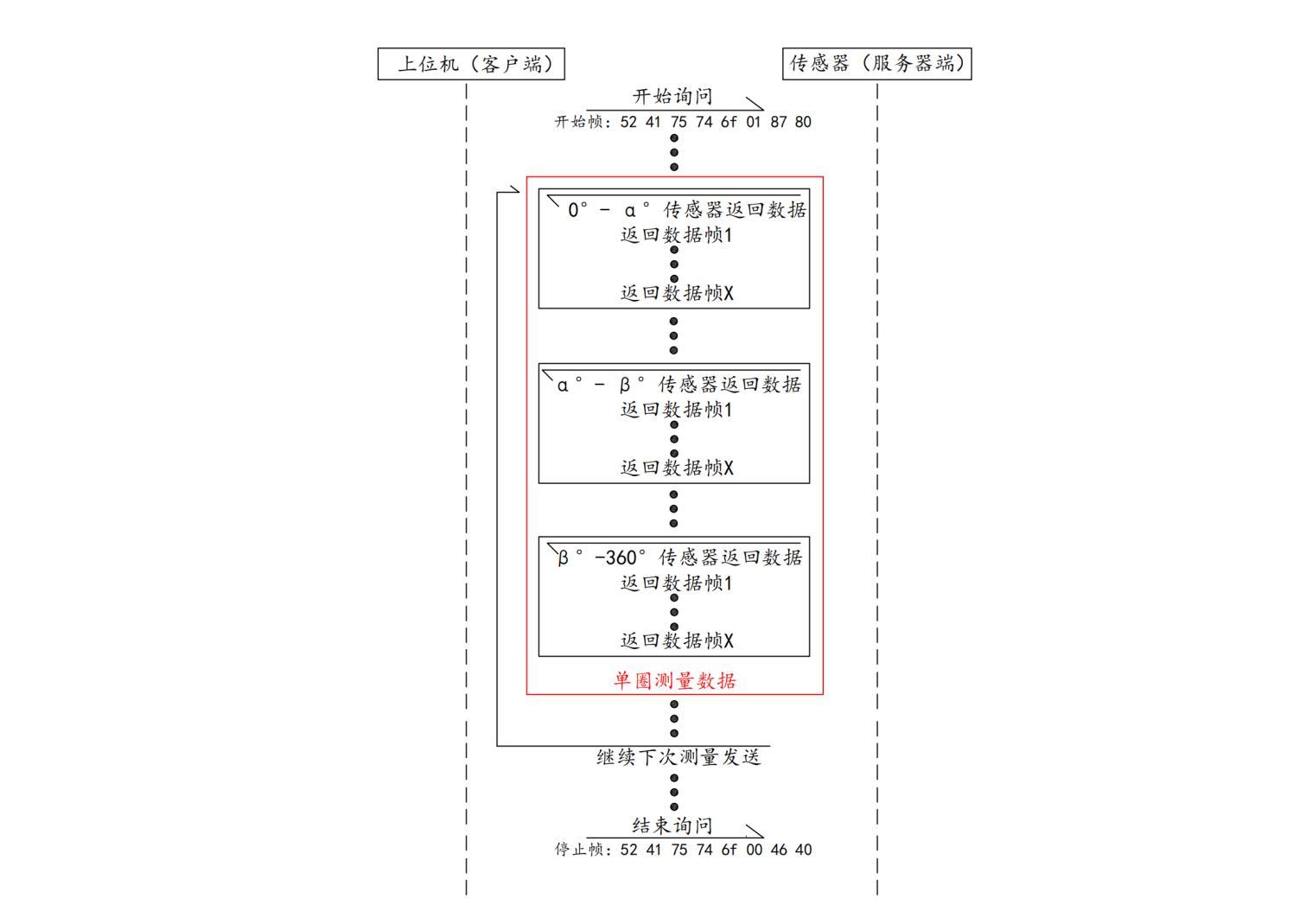
호스트 컴퓨터(클라이언트)는 센서(서버측)로 '데이터 시작 프레임'을 보내고, 센서는 여러 프레임으로 0°~360°의 측정 데이터를 반환합니다. 0°~360°의 전체 측정 데이터(총 360°)를 반환한 후, 센서는 호스트 컴퓨터가 '데이터 중지 프레임'을 보낼 때까지 다음 측정 데이터를 계속 보냅니다.
- 데이터 시작 프레임(16진수)
데이터 구조
시작 코드
|
제어 비트
|
체크 비트
|
5Byte
|
1Byte
|
2Byte
|
시작 코드:고정 데이터는0x52 0x41 0x750x740x6F
제어 비트:
0x01센서가 자동으로 데이터 전송을 시작합니다.
0x00센서가 데이터 전송을 중지합니다.
체크 비트:하위 바이트 우선, 상위 바이트 마지막, Modbus-C 사용RC16해당 방법으로 계산된 체크 비트입니다.
- 측정 데이터 프레임(16진수)
데이터 구조:
데이터 프레임 헤더
|
측정 데이터
|
16Byte
|
가변 길이
|
데이터 프레임 헤더 형식(16진수):
식별자
|
1Byte
|
1Byte
|
|
1Byte
|
|
1Byte
|
|
시작 각도
|
1바이트(상위 바이트 우선)
|
1바이트(하위 바이트 마지막)
|
|
종료 각도
|
1바이트(상위 바이트 우선)
|
1바이트(하위 바이트 마지막)
|
|
현재 데이터 프레임의 측정 지점 총 개수
|
1바이트(상위 바이트 우선)
|
1바이트(하위 바이트 마지막)
|
|
현재 데이터 프레임의 마지막 검출 지점의 시퀀스 번호
|
1바이트(상위 바이트 우선)
|
1바이트(하위 바이트 마지막)
|
|
시작 각도에서 종료 각도까지의 측정 지점 총 개수
|
1바이트(상위 바이트 우선)
|
1바이트(하위 바이트 마지막)
|
|
타임스탬프
|
1바이트(상위 바이트 우선)
|
1바이트(하위 바이트 마지막)
|
1. 식별자(4Byte): 0x48 0x49 0x53 0x4e
2. 시작 각도(2Byte): 현재 반환된 측정 데이터의 시작 각도입니다.
3. 종료 각도(2Byte): 현재 반환된 측정 데이터의 종료 각도입니다.
4. 현재 데이터 프레임의 측정 지점 총 개수(2Byte):
각도 분해능에 따라 시작 각도에서 종료 각도까지의 측정 지점 총 개수가 달라집니다. 이 범위 내의 측정 데이터는 여러 데이터 프레임으로 반환됩니다. '현재 데이터 프레임의 측정 지점 총 개수'는 현재 데이터 프레임에서 반환된 측정 지점의 합계입니다.
5. 현재 데이터 프레임의 마지막 검출 지점의 시퀀스 번호(2Byte):
예: 시작 각도에서 종료 각도까지의 측정 지점 총 개수는800이며, 측정 데이터를 반환하기 위해 2개의 프레임으로 나뉩니다. 현재 데이터 프레임은 1번 지점부터400번 지점까지의 데이터를 반환하므로, '현재 데이터 프레임의 마지막 검출 지점의 시퀀스 번호' 값은400이며, 현재 데이터 프레임이401번 지점부터800번 지점까지의 데이터를 반환하므로, '현재 데이터 프레임의 마지막 검출 지점의 시퀀스 번호' 값은800.
6. 시작 각도에서 종료 각도까지의 범위 내 측정 지점 총 개수(2Byte):
시작 각도에서 종료 각도까지의 범위 내 측정 지점 총 개수는 현재 '레이저 스캔 주파수', '스캔 모터 속도' 및 '단일 지점 샘플링
횟수'에 따라 결정됩니다. 다음은 예시입니다.
7. 타임스탬프(2Byte):
전송된 현재 프레임의 내부 타이밍을 표시하며, 시간 단위는 us이고, 시간 기록 범위는 0~65535us이며, 기록이 가득 차면 데이터가 지워집니다.
측정 데이터(16진수):
첫 번째 지점 측정 데이터(4바이트) |
두 번째 지점 측정 데이터(4바이트) |
…………………(4바이트) |
마지막 지점 측정 데이터(4바이트) |
||||||||||||
측정 거리(2바이트) |
측정 강도(2바이트) |
측정 거리(2바이트) |
측정 강도(2바이트) |
측정 거리(2바이트) |
측정 강도(2바이트) |
측정 거리(2바이트) |
측정 강도(2바이트) |
||||||||
L |
H |
L |
H |
L |
H |
L |
H |
L |
H |
L |
H |
L |
H |
L |
H |
측정 거리 단위는 mm이며, 반사 지점과 센서 사이의 거리 데이터를 출력합니다.
측정 강도는 반사 지점의 강도를 나타내며, 값이 높을수록 물체의 반사 능력이 강함을 나타냅니다.
측정 거리와 측정 강도 모두 하위 바이트 우선, 상위 바이트 마지막입니다.
- 데이터 중지 프레임(16진수)
0x52 0x41 0x75 0x74 0x6F 0x00 0x46 0x40
호스트 컴퓨터가 센서로 데이터 중지 프레임을 보낸 후, 센서는 측정 데이터 반환을 중지합니다.
- 예시 설명
1. 센서 매개변수는 다음과 같이 설정됩니다.
이더넷 모드 인터페이스: TCP 서버
이더넷 IP 주소: 192.168.1.88
스캔 모터 속도: 12.5HZ
센서(서버) 포트: 8080
센서(서버) 포트는 8080으로 고정되어 있으며, 호스트 컴퓨터는 센서와 성공적으로 연결을 설정합니다..
2. 측정 각도 분해능 계산:
레이저 스캔 주파수: 레이저 발신기가 1초 동안 방출하는 레이저 빔의 개수이며, 예를 들어 432KHZ입니다.
스캐닝 모터 속도: 레이저 방출관 회전 모터의 1초당 회전 수, 예를 들어 12.5HZ(초당 12.5회전)를 사용합니다.
단일 지점 샘플링 시간: 단일 측정 지점에서 반복 측정 횟수. 단일 검출 지점 측정을 예로 들면 다음과 같습니다.1회
측정 각도 분해능 = 스캐닝 모터 속도 * 360° / (레이저 스캐닝 주파수 / 단일 지점 샘플링 시간) =0.100°, 측정 각도 분해능은 구성 소프트웨어에 의해 자동으로 계산되며 별도로 설정할 필요가 없습니다.
3. 총 측정 지점 계산:
총 측정 지점 = (종료 각도 - 시작 각도) / 측정 각도 분해능, 총 측정 지점은 소수점 첫째 자리로 반올림되며, 센서 설계에 따라 13개의 각도 범위 데이터 블록으로 나뉩니다. 이 각도 범위 값은 고정되어 있으며 각도 분해능의 변화에 따라 변하지 않습니다. 아래 그림 4를 참조하십시오.
첫 번째 시작 각도
|
첫 번째 종료 각도
|
각도 범위
|
두 번째 시작 각도
|
두 번째 종료 각도
|
각도 범위
|
세 번째 시작 각도
|
세 번째 종료 각도
|
각도 범위
|
네 번째 시작 각도
|
네 번째 종료 각도
|
각도 범위
|
24°
|
48°
|
24°
|
48°
|
72°
|
24°
|
72°
|
96°
|
24°
|
96°
|
120°
|
24°
|
다섯 번째 시작 각도
|
다섯 번째 종료 각도
|
각도 범위
|
여섯 번째 시작 각도
|
여섯 번째 종료 각도
|
각도 범위
|
일곱 번째 시작 각도
|
일곱 번째 종료 각도
|
각도 범위
|
여덟 번째 시작 각도
|
여덟 번째 종료 각도
|
각도 범위
|
120°
|
144°
|
24°
|
144°
|
168°
|
24°
|
168°
|
192°
|
24°
|
192°
|
216°
|
24°
|
아홉 번째 시작 각도
|
아홉 번째 종료 각도
|
각도 범위
|
열 번째 시작 각도
|
열 번째 종료 각도
|
각도 범위
|
열한 번째 시작 각도
|
열한 번째 종료 각도
|
각도 범위
|
열두 번째 시작 각도
|
열두 번째 종료 각도
|
각도 범위
|
216°
|
240°
|
24°
|
240°
|
264°
|
24°
|
264°
|
288°
|
24°
|
288°
|
312°
|
24°
|
열세 번째 시작 각도
|
열세 번째 종료 각도
|
각도 범위
|
|
|
|
|
|
|
|
|
|
312°
|
336°
|
24°
|
|
|
|
|
|
|
|
|
|
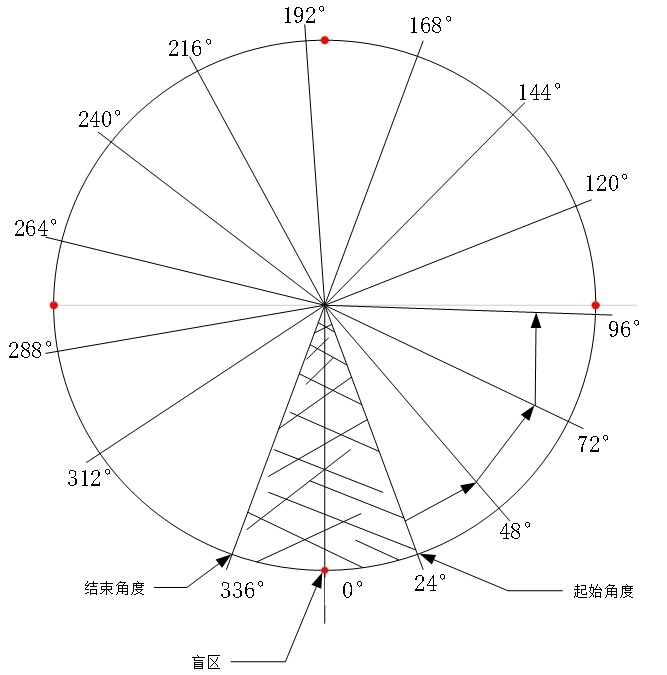
예를 들어 종료 각도가 24°, 시작 각도가 0°, 각도 분해능이 0.100°인 경우 총 측정 지점 = (24-0) / 0.100 = 240입니다.
센서 상태 및 영역 감지 데이터 수집
클라이언트 측에서 요청을 시작하고 연결을 설정한 후 아래 규칙에 따라 데이터 전송이 시작됩니다.
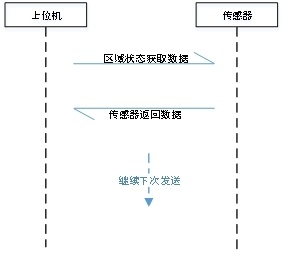
데이터 수집 전송메시지
데이터 식별자
|
5Byte
|
센서 작동 모드 |
1Byte
|
센서 채널 값
|
1Byte
|
지능형 채널 선택 모드의 전환 각도 값
|
2Byte
|
지능형 채널 선택 모드의 전환 속도 값
|
2Byte
|
채널 그룹 번호
|
2Byte
|
잘못된 데이터 비트
|
3Byte
|
체크 비트
|
2Byte
|
- 데이터 식별자 (5바이트)
식별자는 고정되어 있습니다데이터:0x57 0x53 0x69 0x6d 0x75이 데이터의 기능;
- 센서 작동 모드 (1바이트)
00: 잘못된 명령
01: 채널 지정 모드
02: 지능형 채널 선택 모드
- 센서 채널 값 (1바이트)
센서에서 사용하는 현재 감지 채널을 제어합니다. 데이터 범위 00-63;
- 센서 채널 각도 (2바이트)
채널 그룹 모드의 각도 값, 데이터는 -180에서 180까지의 부호 있는 데이터 범위에 있습니다.
- 센서 채널 속도 값 (2바이트)
채널 그룹 모드의 속도 값, 데이터는 부호가 있는 데이터 범위 -300-300;
- 센서 채널 그룹 번호 (2바이트)
센서에서 사용하는 현재 감지 채널 그룹 번호를 제어합니다. 데이터 범위 00-04;
- 잘못된 데이터 (3바이트)
잘못된 데이터, 기본 데이터를 보내야 합니다0x00;
- 체크 비트 (2바이트)
데이터 체크 비트, Modbus 하위 바이트 우선 CRC16체크 방법. 체크 값은 체크 수식을 사용하여 계산됩니다. 구체적인 계산 방법은 부록을 참조하십시오.
센서 반환 데이터
데이터 식별자
|
5Byte
|
센서 채널 값
|
1Byte
|
잘못됨
|
1Byte
|
출력 상태
|
1Byte
|
잘못된 데이터
|
1Byte
|
오류 상태
|
1B바이트 (H)
|
|
1바이트 (L)
|
현재 온도
|
1Byte
|
|
1Byte
|
내부 모터 속도
|
1B바이트 (H)
|
|
1바이트 (L)
|
구동 전압
|
1B바이트 (H)
|
|
1바이트 (L)
|
수신 전압
|
1B바이트 (H)
|
|
1바이트 (L)
|
송신 전압
|
1B바이트 (H)
|
|
1바이트 (L)
|
체크 비트
|
1B바이트 (L)
|
|
1바이트 (H)
|
- 데이터 식별자 (5바이트)
식별자는 고정되어 있습니다데이터:0x57 0x53 0x69 0x6d 0x75이 데이터의 기능;
- 현재 채널 값 (1바이트)
센서의 현재 채널 값;
- 잘못된 데이터 (1바이트)
잘못된 데이터;
- 출력 상태 (1바이트)
B그것7 |
B그것6 |
B그것5 |
B그것4 |
B그것3 |
B그것2 |
B그것1 |
B그것0 |
잘못됨
|
OUT 3 |
OUT2 |
OUT1 |
||||
매개변수 설정과 관련됨센서 출력 로직:
일반적으로 닫힘 모드(기본값)
00: 물체 감지됨;
01: 물체 미감지
노멀리 오픈 모드
01: 물체 감지됨;
00: 물체 미감지;
- 잘못된 데이터 (1바이트)
잘못된 데이터;
- 센서 고장 상태(2바이트)
|
||||||||||||||||||||||||||
센서 고장 코드
|
- 현재 온도(2바이트)
|
||||
부호 있는 데이터, 데이터 범위 -5000-10000; 센서의 현재 내부 온도를 표시하며, 온도 단위는 0.01℃입니다. 모니터링 온도가 80.00℃를 초과하면 센서는 과온 보호를 표시합니다.
|
||||
- 내부 모터 속도(2바이트)
|
||||
부호 없는 데이터, 데이터 범위 0-3000, 센서의 현재 내부 모터 속도를 표시하며, 속도 단위는 1r/min입니다.
|
||||
- 구동 전압(2바이트)
|
||||
부호 없는 데이터, 데이터 범위 0-1600; 센서 구동 모터의 현재 전압을 표시하며, 전압 단위는 0.01V입니다.
|
||||
- 수신 보드 전압(2바이트)
|
||||
부호 없는 데이터, 데이터 범위 0-25000; 센서 수신 보드 ADP 전압을 표시하며, 전압 단위는 0.01V입니다.
|
||||
- 송신 보드 전압(2바이트)
|
||||
부호 없는 데이터, 데이터 범위 0-5500; 센서 송신 보드 전압을 표시하며, 전압 단위는 0.01V입니다.
|
||||
- 체크 비트 (2바이트)
데이터 체크 비트, Modbus 하위 바이트 우선 CRC16검사 방법. 검사 값은 검사 공식을 사용하여 계산됩니다.
cBuffer: CRC 검사 코드 계산을 위한 배열입니다.
iBufLen: 배열의 길이입니다.
unsigned int CRC_Verify(unsigned char *cBuffer, unsigned int iBufLen)
{
unsigned int i, j; //#define wPolynom 0xA001
unsigned int wCrc = 0xffff;
unsigned int wPolynom = 0xA001;
/*---------------------------------------------------------------------------------*/
for (i = 0; i < iBufLen; i++)
{
wCrc ^= cBuffer[i];
for (j = 0; j < 8; j++)
{
if (wCrc & 0x0001)
{ wCrc = (wCrc >> 1) ^ wPolynom; }
else
{ wCrc = wCrc >> 1; }
}
}
return wCrc;
}
ROS 환경에서 센서를 사용하는 고객의 경우 특정 드라이버를 사용할 수 있습니다. ROS 드라이버 패키지는 다음과 같이 얻을 수 있습니다.
방문: www.hinson-xs.com |
Hinson 영업 및 기술 지원 담당자에게 문의하십시오. |
Gitee 방문:https://gitee.com/hinson-xs/hins_he_driver.git
|
센서가 정상적으로 작동하지 않거나 센서 상태를 확인할 수 없는 경우 다음 표를 참조하여 고장 진단 및 확인을 수행하십시오.
레이저 센서는 LED 점멸을 통해 고장 상태를 표시합니다.
LED 점멸(회수) |
고장 설명 |
0 |
센서 정상 상태
|
1 |
센서 엔코더 신호 오류
|
2 |
수신 보드 신호 없음
|
3 |
메모리 데이터 오류
|
4 |
연결 오류
|
5 |
시뮬레이션 오류
|
6 |
과온 보호
|
7 |
송신 저전압 보호
|
8 |
송신 과전압 보호
|
9 |
구동 저전압 보호
|
10 |
구동 과전압 보호
|
11 |
수신 저전압 보호
|
12 |
수신 과전압 보호
|
9.1 보증 기간
* 센서는 제한적 보증을 제공합니다. 보증 기간 동안 품질 문제 또는 설계 결함으로 인해 제품을 정상적으로 사용할 수 없는 경우 무상 판매 후 유지 보수를 제공합니다.
* 보증 기간: 판매일로부터 2년
* 보증 조건을 충족하는 보증 기간 내 제품은 무상으로 수리 또는 교체됩니다.
* 본 제품의 보증 및 판매 후 서비스는 중국 본토로 제한됩니다.
* 운송 중 손상으로 인해 정상적으로 사용할 수 없는 제품;
부품 자체의 손상으로 인해 정상 작동이 불가능한 제품;
설계 결함으로 인해 정상적으로 사용할 수 없는 제품;
9.3 면책 범위
제품 사용 중 다음과 같은 조건에 유의하십시오. 무료 애프터 서비스 및 보증을 제공하지 않습니다.
설명서에 따른 제품의 잘못된 설치로 인한 손상;
부적절한 환경 및 조건에서 제품을 사용함으로써 발생한 손상;
제품 설명서 사양을 따르지 않아 발생한 손상;
회사의 허가 없이 제품을 무단으로 분해하거나 수리한 경우;
자연재해, 화재 및 기타 불가항력적인 외부 힘으로 인한 손상.
9.4 기술 지원
해결할 수 없는 오류가 있는 경우 다음과 같이 문의하십시오.
전화: +86-757-22218956
이메일: lixianjiao@hinson-xs.com
회사 웹사이트:www.hinson-xs.com
제조업체: 광동 힌슨 테크놀로지 유한공사
업계를위한 솔루션, 선택 준비

Hinson
Guangdong Hinson Technology Co., Ltd.
업계 리더가 될 고객 지원
산업 자동화 감지 및 제어 솔루션 제공 업체
WeChat 공개 번호
비즈니스 컨설팅
서비스 핫라인
건물 8, Shengyue Garden, 33 Shunye East Road, Xingtan Town, Shunde District, Foshan City, 광동성
(순데 기계 산업 단지)
 Português
Português